CASE STUDY: IMOS – robots used for environmental monitoring and protection
Case Studies
Boeing Australia – Where humans and automation work together
Since the 2008 establishment of Boeing’s advanced research and development unit …
IR4 – Mass communication via robotic automation
IR4 is an early revenue technology company that is setting global benchmarks in …
Kalmar – AutoStrad Terminal Solution
Within the next 10-15 years many of the major stevedores will automate and the …
Wide area surveillance of the oceans requires a diversity of solutions …
Rio Tinto’s fleet of autonomous haul trucks have moved more than 1 billion tonnes of …
Share this story
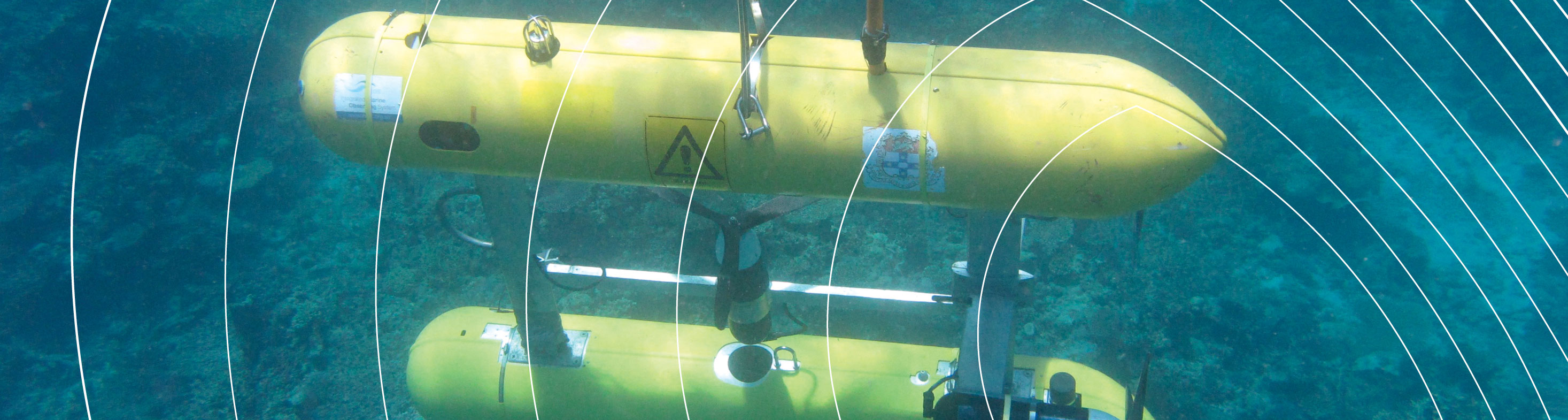
Australia’s integrated marine observing system (IMOS) was established in 2007 with support from the Commonwealth through the National Collaborative Research Infrastructure Scheme (NCRIS). The objective of this program was to provide access to critical infrastructure to support marine science research on a national scale. A pilot study was funded to examine the use of autonomous underwater vehicles (AUVs) to support the observation of benthic habitats.
In 2009, the IMOS AUV facility and stakeholders at university and government research labs within New South Wales, Tasmania, Western Australia and Queensland nodes of the IMOS program proposed to establish an integrated benthic ecology program at key sites around Australia. The program was designed to collect observations using AUVs to document and monitor changes in benthic habitats.
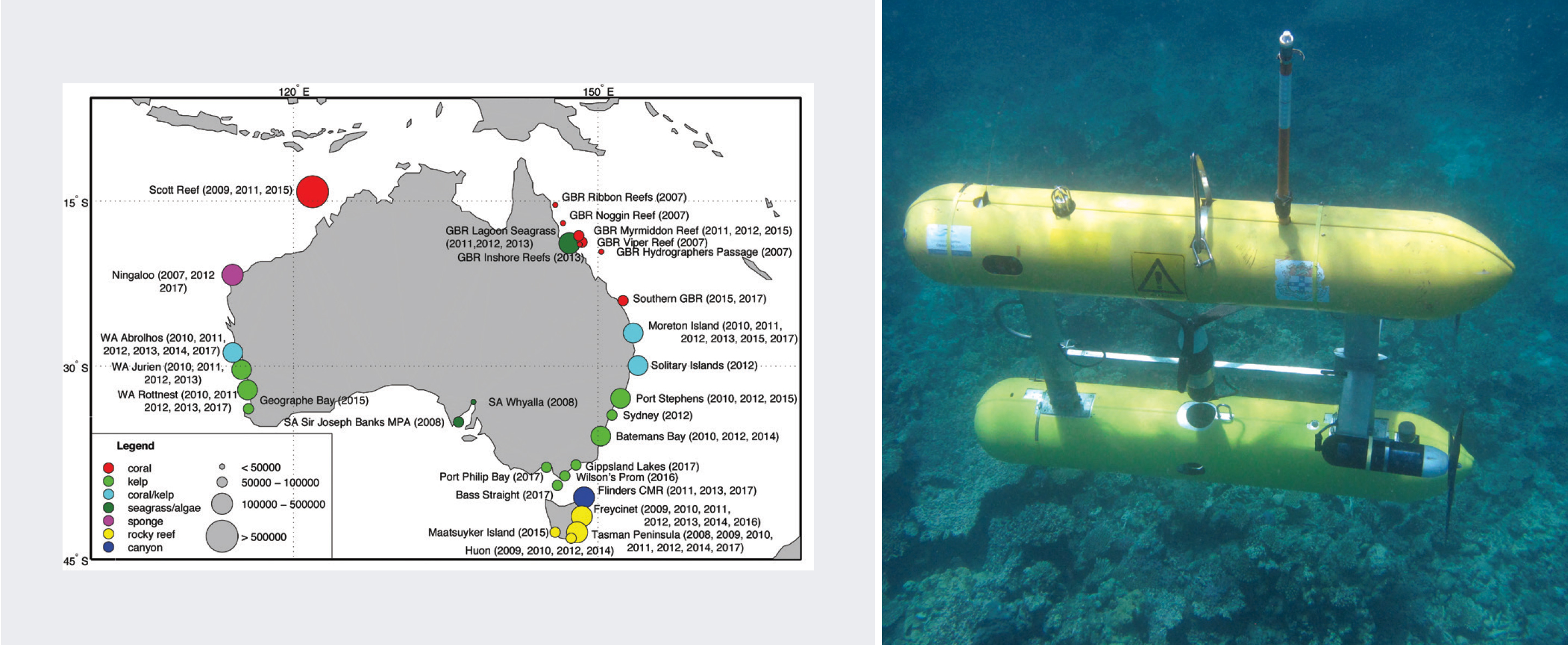
Benthic reference sites were established as part of this program in 2009. These sites have been revisited on an annual or semi-annual basis for the duration of the funding period to provide a sustained set of observations at these locations. This includes AUV-based georeferenced imagery and bathymetry, together with measurements of conductivity, temperature, depth, chlorophyll-a, CDOM and backscatter in red.
AUV dive sites were selected to capture habitats at a variety of depths and latitudes along the east and west coasts of Australia. The general sampling methodology using the AUV was designed to monitor the benthic habitat components of reefs that contribute to overall reef biodiversity, productivity and resilience. The sampling design was to be optimised using information from existing survey data to define initial transect locations, which included multibeam bathymetry at many sites. The processes of interest occur at multiple spatial scales, so a nested hierarchical sampling method was adopted to detect changes at these differing scales. The program has been very successful over the past decade, collecting millions of images of the seafloor around Australia and making these available to the scientific community through online data portals developed by the facility and IMOS affiliated groups. These observations are providing important insights into the dynamics of key ecological sites and their responses to changes in oceanographic conditions through time.
Trending Article
An Australian university (ANU) has been the first to trial intelligent drones for automated inspection of solar power plants.
The project is an industry-researcher collaboration funded by the Australian government’s Australian Renewable Energy Agency (ARENA) developing a cost-effective robotic inspection system…
ANCA – Australia’s largest user of industrial robots
ANCA is an Australian company, founded in Melbourne in 1974, now with offices...
BIA5 Innovation Robotics and customers
BIA5 Pty Ltd is a start-up company that specialises in designing, manufacturing...

Harvey - the capsicum-picking robot
The horticulture industry in Australia has a gross value of more than $AU8...

Pegasus Alpha – Flying car
In the back streets of Brisbane, two brothers with a passion for the automotive industry had a feeling that the future is vertical.